PI: Brennan Phillips, Undersea Robotics and Imaging Laboratory
Funding Sources: ONR, NIUVT
SUMMARY: Deep-sea unmanned underwater vehicles (UUVs) used by the scientific community are traditionally industrial-scale robots capable of supporting a wide range of tools, sensors, and sampling equipment in a robust and repetitive fashion. While extremely effective, the vast majority of these systems require extensive resources for development, operation and maintenance. The scale of contemporary deep-sea UUVs, in particular tethered vehicles such as ROVs, is driven by several factors: the tether (which determines the size of the topside winch system and support vessel), power-hungry components such as large thrusters and manipulator systems, expensive electronic modules and waterproof connectivity components, and the widespread use of 1-atmosphere pressure housings made of aluminum or titanium. These sophisticated and logistically complex systems are expensive, physically large, and have restrictive access and as a result a tight bottleneck exists for training and education in underwater robotics.

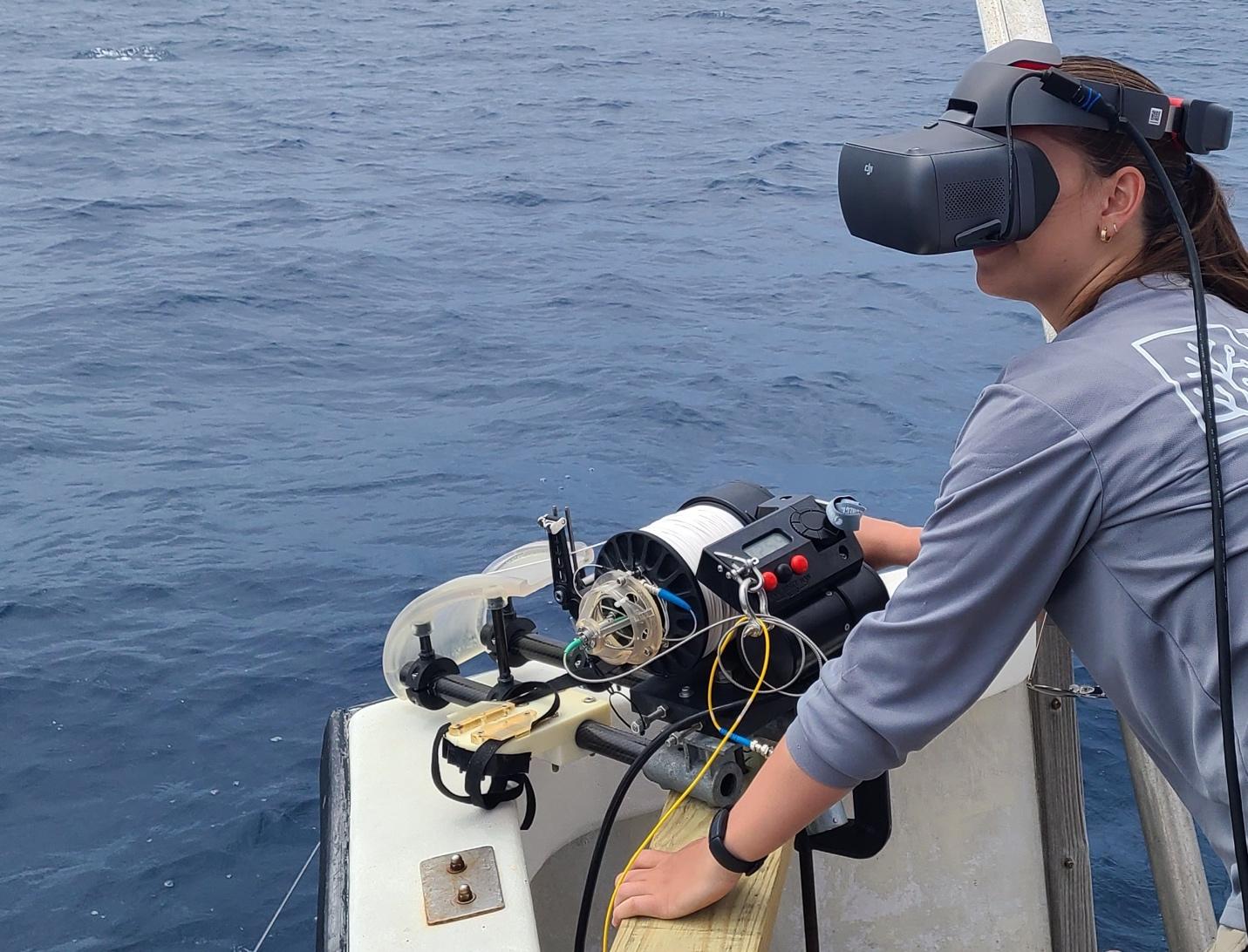
The Undersea Robotics and Imaging Laboratory (URIL) at URI has made several recent technological advances that have the potential to fundamentally change how deep-sea robots are designed and operated on a broad user scale. These include the invention of fiber optic microtethers, pressure tolerant and economical deep-sea imaging and computing solutions, complete low-cost soft robotic manipulator systems, and the extensive application of additive manufacturing methods for pressure housings and size-optimized molds, frames, and sensor configurations. We integrate these innovations to create novel systems capable of imaging, sensing, and exploring the deep ocean at a fraction of the cost of contemporary methods, and often using non-traditional oceanographic platforms and vessels of opportunity. The design and prototyping work is almost exclusively conducted by URI students themselves and when possible our designs, code, and results are publicly shared with the global community.