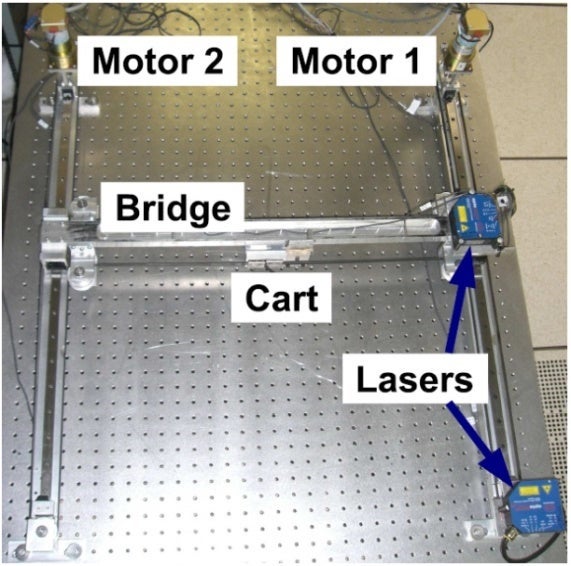
XY positioning systems are widely used in industry to position a part or a tool within a two dimensional rectangular area. These systems are typically used for cutting, welding, marking or for pick-and-place applications. Current implementations of XY positioning systems typically consist of two linear guides, each with their own independent timing belts or ball/lead screws and motors. One guide is stacked on top of the other, oriented perpendicularly to the other. Although the current configurations of XY positioning systems are widely used, these systems tend to be bulky and they are not very suitable for low profile applications. High speed systems are desirable in manufacturing because they can increase productivity. To provide a light-weight, low-cost, compact positioning system, a single belt-driven H-Frame type XY positioning system can be used. Such a system consists of two guides that are parallel to each other, and a third guide perpendicular to the first two to form a shape resembling a capitalized H (see Figure below). The most unique aspect of the device’s configuration is that it only uses one belt and the motors are stationary. The use of a single belt allows the device to be low-profile because all the guides are in the same plane.
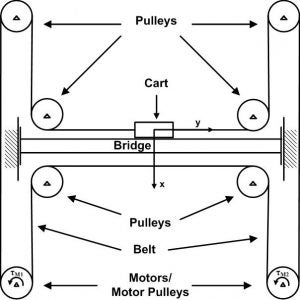
This project addresses the dynamic modeling and control of a custom-built, belt-driven, parallel-type xy-positioning system constructed in the form of a capitalized H. The system uses one long timing belt to transmit the rotation of two stationary motors to end-effector motion. Due to less moved masses, the studied H- frame system is potentially capable of fast acceleration and therefore faster positioning than traditional stacked systems. The use of an elastic transmission element also causes the biggest disadvantage of the system, which is an uncertainty of end-effector position due to stretching in the belt. Thus one objective of this work was to develop a dynamic model that can capture the response of this system. Using Lagrange’s Method, an 8th-order lumped parameter dynamic model of the stage motion was derived. The effect of non-linear friction in the pulleys and cart motion was added to the model. The response of the model was simulated in Matlab Simulink, and the model prediction was compared with real-data obtained from the developed system. The results show that the model can accurately predict the dynamics of the developed H-Frame positioning system. Another objective is to develop techniques to control the motion of this stage.
References:
- Zaki, , K. Sollmann, M. Jouaneh and E. Anderson, “Nonlinear Control of a Belt Driven Two-Axis Positioning System”, in Proceedings of the 2008 ASME International Mechanical Engineering Congress and Exposition, Boston, MA, November 2008, 11, pp 807-814.
- Sollmann, M. Jouaneh, and D. Lavender, “Dynamic Modeling of a Two Axes, Parallel, H-Frame Type XY-positioning System”, ASME/IEEE Trans. on Mechatronics, Vol. 15, No. 2, pp. 280-290, 2010.
- Sollmann and M. Jouaneh, “Dynamic Modeling of a Single-Axis Belt Drive System”, Int. J. Modeling, Identification and Control, Vol. 12, No. 4, pp.386–394, 2011.