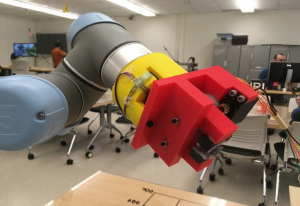
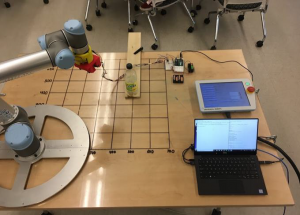
The objective of this project is to investigate and develop robotic techniques for securing and removal of caps from bottles and jars through the use of custom-made sensor-equipped grippers. As a starting point, a robotic system was designed to both secure and remove the cap from a plastic bottle using force sensing resistors to register the completion of the tasks. The system was based around a UR5 robotic arm for which a gripping device was designed and manufactured. Part of the gripping system consisted of a dynamic force sensing component. The two force sensors were positioned to sense tension and torsion between the gripper and robot in order to detect when the cap was completely removed or secured. Electronics were used to control the gripper and to receive information from the sensors. A program was developed to control the position of the robotic arm, open and close the gripper, receive sensor readings, and use the readings to initiate commands for the robot and gripper. The system was designed, built, and tested, and the final product successfully secured and removed the cap from the bottle and stopped when the cap was completely secured or removed.
References:
Lee, B. and Jouaneh, M., “A Robotic System for Securing and Removing a Plastic Bottle Cap”, In Proceedings of the 2019 IEEE MIT UTRC Conference, Cambridge, MA, October 2019.