Our latest paper has been accepted for presentation at ECC 2026. In this paper we study the observability properties of visual-place-recognition (VPR)-based localization systems for mobile robots.
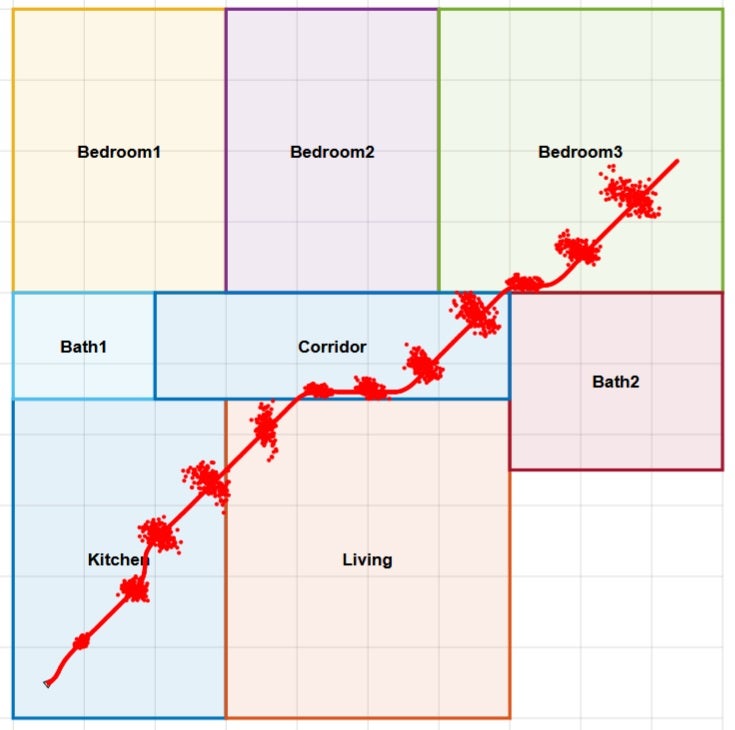
In our setup, the environment is split into discrete cells and the robot’s camera, through a VPR module, provides a discrete place label together with probabilistic distribution over cells, indicating the likelihood of being in each cell. An idealized, quantized version of this measurement is introduced to enable a rigorous observability analysis. Using a smooth surrogate of the discontinuous measurement map, we apply the Hermann–Krener rank test to characterize weak local observability as the measurement resolution increases. The theoretical results identify conditions under which localization is possible or ambiguous given region-based sensing. A particle filter implementation using the probabilistic measurement model is employed to validate the analytical findings in simulation, confirming the predicted observability properties.