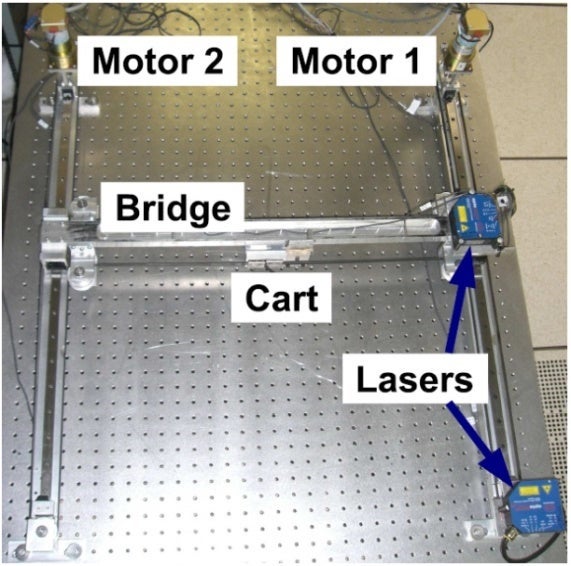
XY positioning systems are widely used in industry to position a part or a tool within a two dimensional rectangular area. These systems are typically used for cutting, welding, marking or for pick-and-place applications. Current implementations of XY positioning systems typically consist of two linear guides, each with their own independent timing belts or ball/lead […]
Continue reading "Design, Modeling and Control of a H-Frame Type XY Positioning System"Design, Modeling and Control of a H-Frame Type XY Positioning System