
Research
Control of Over- and Under- Actuated Unmanned Vehicles
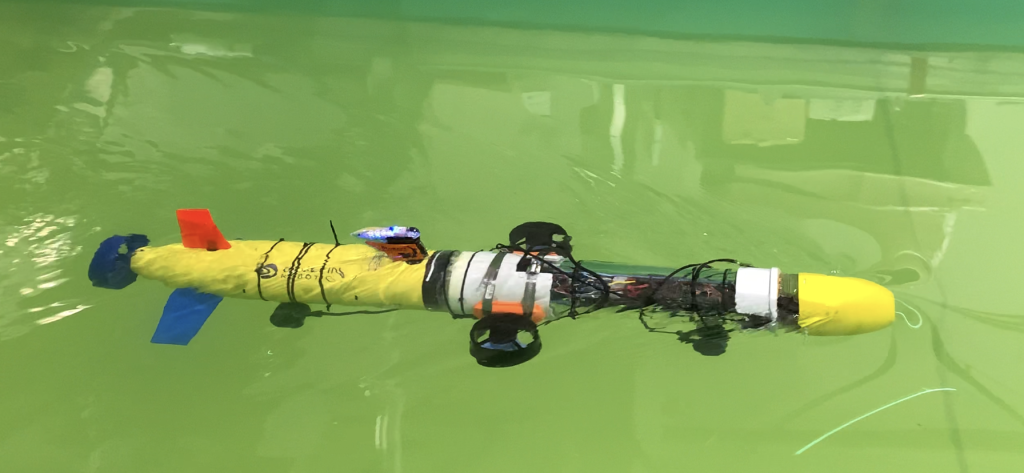
Snyder, W., Roman, C., Licht, S. Hybrid actuation with complementary allocation for depth control of a Lagrangian sea-floor imaging platform. J Field Robotics. 2018; 35: 330– 344.
https://doi.org/10.1002/rob.21716
Soft Robotic Grippers for Ocean Exploration
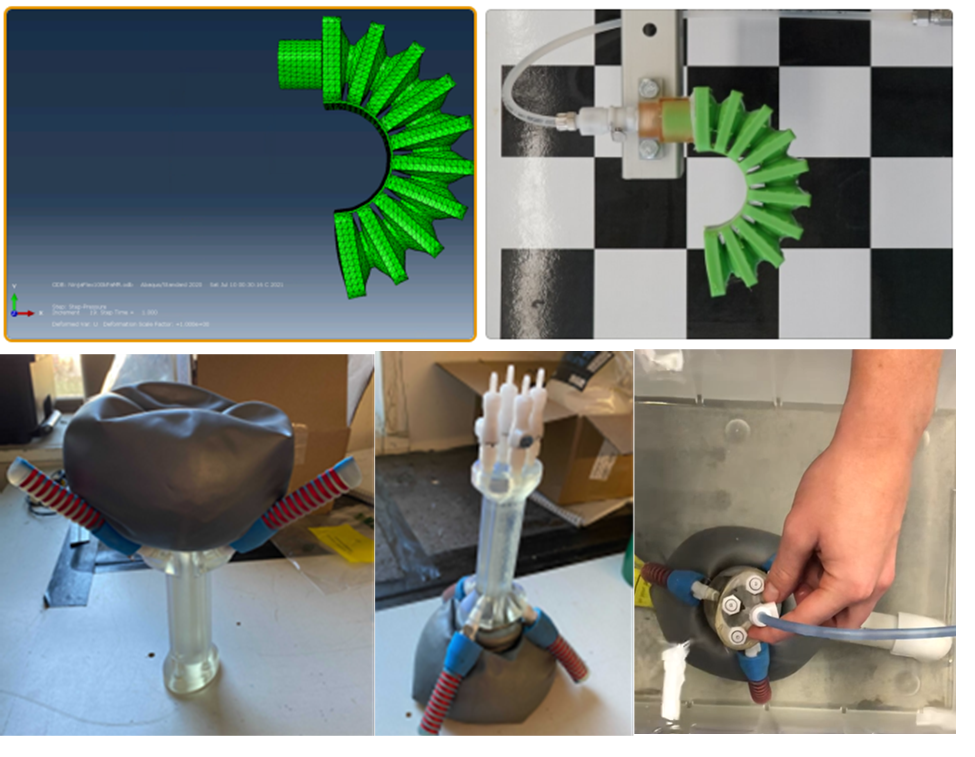
Licht, S., Collins, E., Lopes Mendes, M., and Baxter, C.B.P. Stronger at Depth: Jamming Grippers as Deep Sea Sampling Tools. Soft Robotics. Dec 2017.305-316.
http://doi.org/10.1089/soro.2017.0028 [URI Library .pdf]
Technology Development for Aerial Characterization of Evolving Shorelines
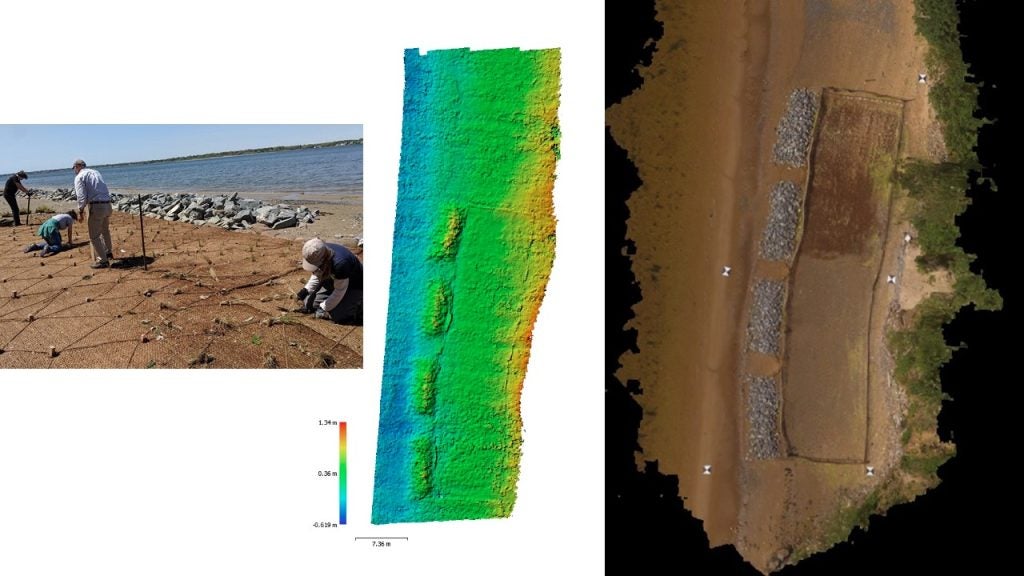
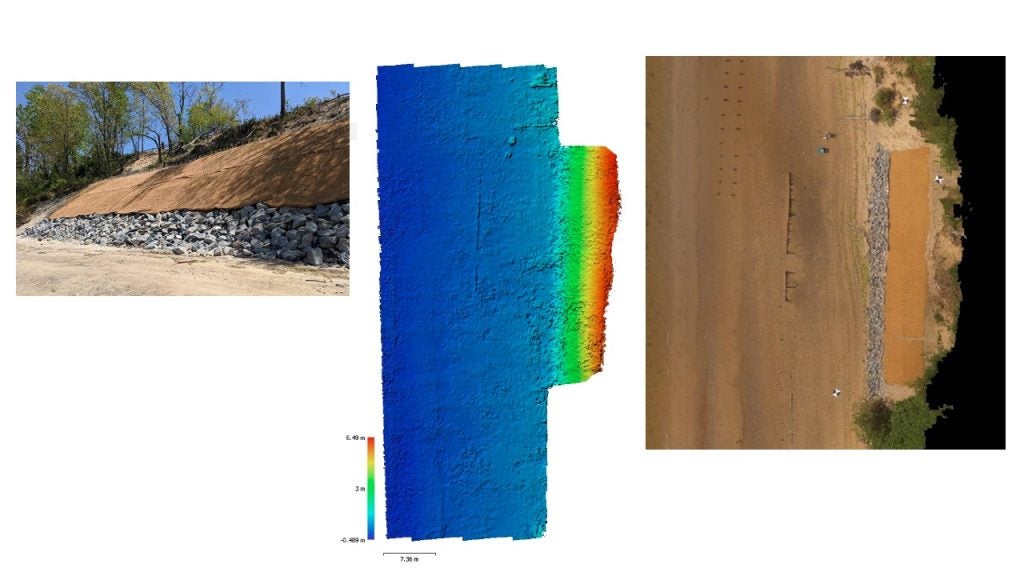
Ultra Lightweight Autonomous Surface Vehicles

K. D. von Ellenrieder, H. C. Henninger and S. Licht, “Dynamic modelling and control of a portable USV for bathymetric survey,” Global Oceans 2020: Singapore – U.S. Gulf Coast, 2020, pp. 1-7,
doi: 10.1109/IEEECONF38699.2020.9389412.
People
Principal Investigator
Stephen Licht, Associate Professor of Ocean Engineering
Dr. Licht received his Ph.D. in Oceanographic and Mechanical Engineering in 2008 from the MIT/WHOI Joint Program. Prior to joining the URI faculty, he was a Senior Research Scientist with the Maritime Research Group at iRobot, a Senior Robotics Engineer with Vecna Robotics, and a Research Engineer at the Computer Science and Artificial Intelligence Laboratory (CSAIL) at MIT. He served as a Research Affiliate with the MIT Department of Mechanical Engineering from 2012-2019, and as Visiting Faculty in the Facultà di Scienze e Technolgie della Libera Università di Bolzano from 2019-2020.
Graduate Research Assistants

Benjamin Rahming, Ocean Engineering, PhD

Joseph Bevilacqua, LT, USN, Ocean Engineering, MS
Frances Truong, Ocean Engineering, MS
Frances received her bachelor’s degree at the University of Michigan in Naval Architecture and Marine Engineering. When she’s not working on marine robotics, she spends her time drawing, rockhounding, and playing animal crossing.

Olivia Breglia, Ocean Engineering, MS
Undergraduate Research Assistants

Andrew Baccari, Ocean Engineering, Class of 2026
Andrew was born to do robotics, but is being forced to do Matlab. If you are reading this, send for help!
Shanea Togninalli, Ocean Engineering, Class of 2027

McKenzie Ezell, Ocean Engineering, Class of 2027
McKenzie is a senior in the Japanese International Engineering Program at the University of Rhode Island, with a concentration on ocean robotics. In her free time, she enjoys reading non-fiction and rock climbing.
Former Research Assistants and Summer Associates
Alexei Sondergeld, Ocean Engineering (PhD, 2025)
Roy Gilboa, Ocean Engineering (M.S. 2022)
URI Graduate School of Oceanography, Narragansett, RI
Michael Rock, Ocean Engineering (B.S. 2021, M.S. 2022)
Jaia Robotics, Bristol, RI
Jessica McLaughlin, Ocean Engineering (B.S. 2022)
Scripps Institution of Oceanography, Sand Diego, CA
David Nadeau, Ocean Engineering (B.S. 2022)
Rose Shayer, Ocean Engineering (B.S. 2021)
NSWC-Carderock, Carderock, MD

Letti Kittel, Ocean Engineering (B.S. 2019)
Waymo, San Francisco, CA

Marissa Torres, Ocean Engineering (B.S. 2017, M.S. 2019)
US Army Corp of Engineers Cold Regions Research Lab, Hanover, NH

Ian McElroy, Ocean Engineering (B.S. 2019, M.S. 2020), French (B.A. 2019)
FORSSEA Robotics, Paris, France
Joshua Wood, Ocean Engineering B.S. 2023 and M.S. 2025
Gregory Bales, Ocean Engineering/Marine Biology B.S. 2023 and Ocean Engineering M.S. 2025
Michael Antonucci, Ocean Engineering, B.S. (NUWC-Newport)
George Badlissi, Ocean Engineering, B.S (NUWC-Newport)
Everett Collins, Ocean Engineering, B.S. (NUWC-Newport)
Samuel Rauworth, Ocean Engineering, M.S. 2015 (Martin Defense Group)
Paulstephen Chierico, Ocean Engineering, M.S. (United States Navy)
Dane Elles, Ocean Engineering, M.S. (United States Navy)
Matthew Perkins, Ocean Engineering, M.S, PhD. (NUWC-Newport)
Nathan Gonzalez, Gordon College
Ashley Hutchins, Community College of Rhode Island