By Josh Wood (URI Ocean Engineering MS Student) with Jason Noel (URI Ocean Engineering PhD Student)
1.1 Background of Engineering Technology Utilized – The Vehicle
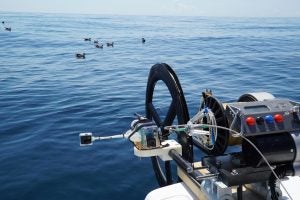
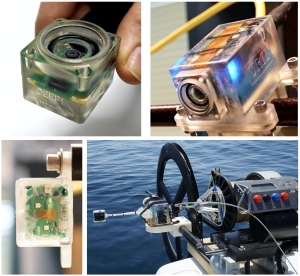
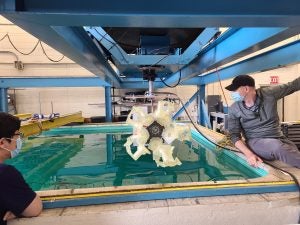
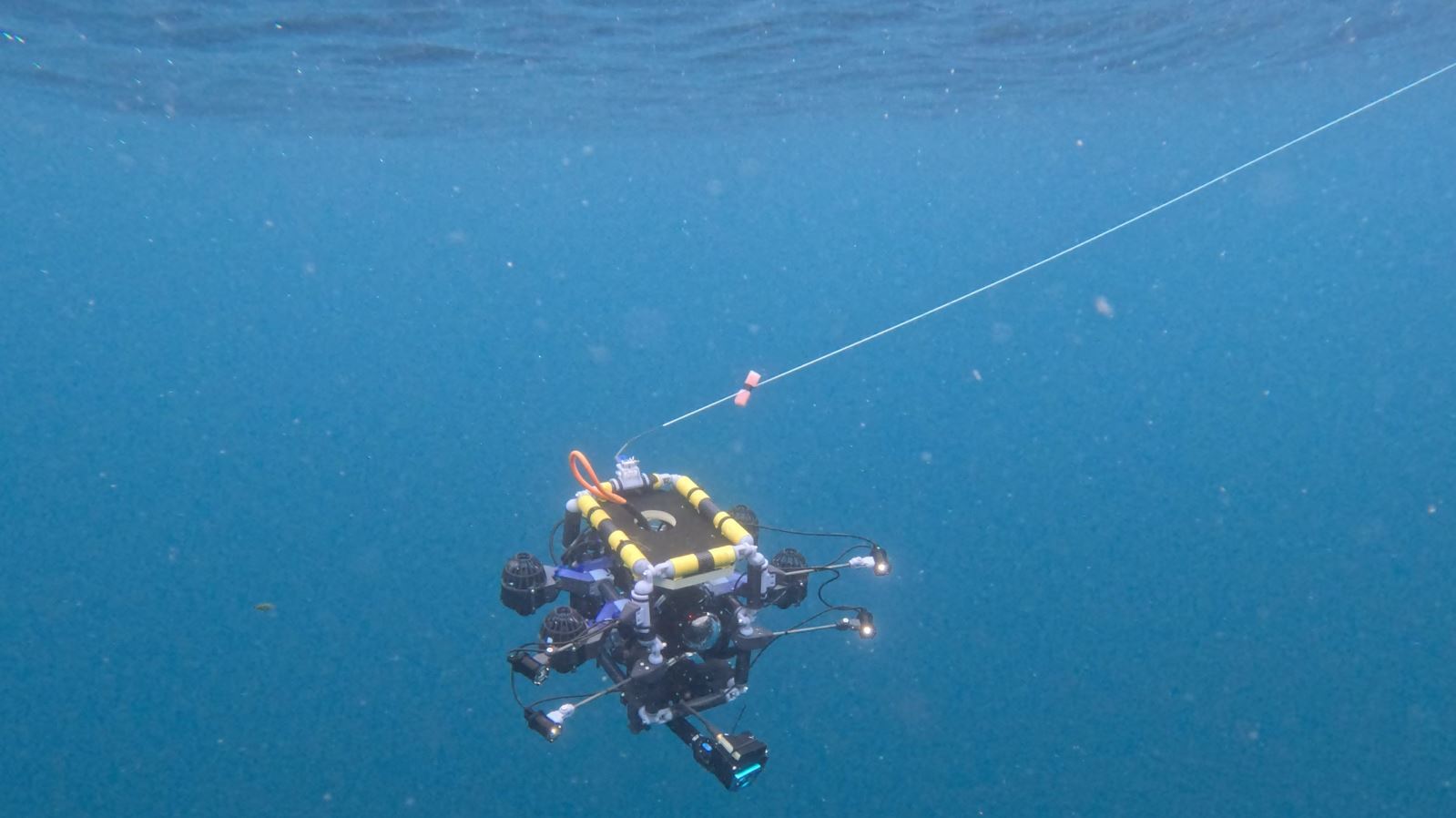
The ROV FiberFish is a developmental remotely operated vehicle (ROV) that utilizes composite materials and off-the-shelf consumer-grade electronics systems in order to provide a robust and low-cost alternative to existing deep-sea robots of similar capabilities. As the system is still currently under development, and has yet to formally publish important results, an in-depth description is unavailable at this time. A general description of the system is as follows: The ROV FiberFish is a small ROV, with dimensions of roughly 17″x20″x16″ (length x width x height) and a dry weight of about 25 pounds. Its notable features include eight thrusters (four of which aligned to provide vertical thrust and 4 angled to provide lateral thrust and turning moments) , two large aluminum pressure housing (one for the electronics of the system and one for the battery), a frame composed of carbon fiber tubes and SLA (stereolithography) created brackets, four lights, a basic bow-facing manipulator, and a fiber optic tether for telemetry and control. The carbon fiber tubes constituting the frame of the vehicle have sealed air volumes within, ultimately providing net buoyancy to the vehicle and reducing the amount of necessary syntactic foam. The vehicle is capable of rapid disassembly for secure storage in a Pelican 1637 Air case, and can be flown with as a standard checked bag.
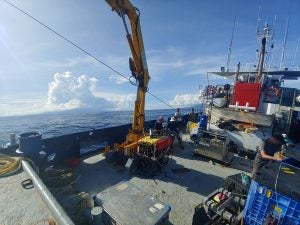
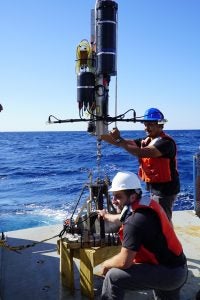
While there are a number of novel technologies implemented on this ROV, the overarching purpose of the vehicle is simple: to create a low-cost and easy-to-deploy deep-sea research platform. The joint cruise aboard the S/Y Eugen Seibold sought to validate this goal by facilitating the maiden deployment of the vehicle, while at the same time using the vehicle to support biological research prepared by other members of the cruise. The successful initial deployment (and subsequent deployments thereafter) allowed for real-time field evaluation of the vehicle and its various design components. This ultimately resulted in informed design alterations and modifications to continue to develop the vehicle to achieve and surpass its goals.
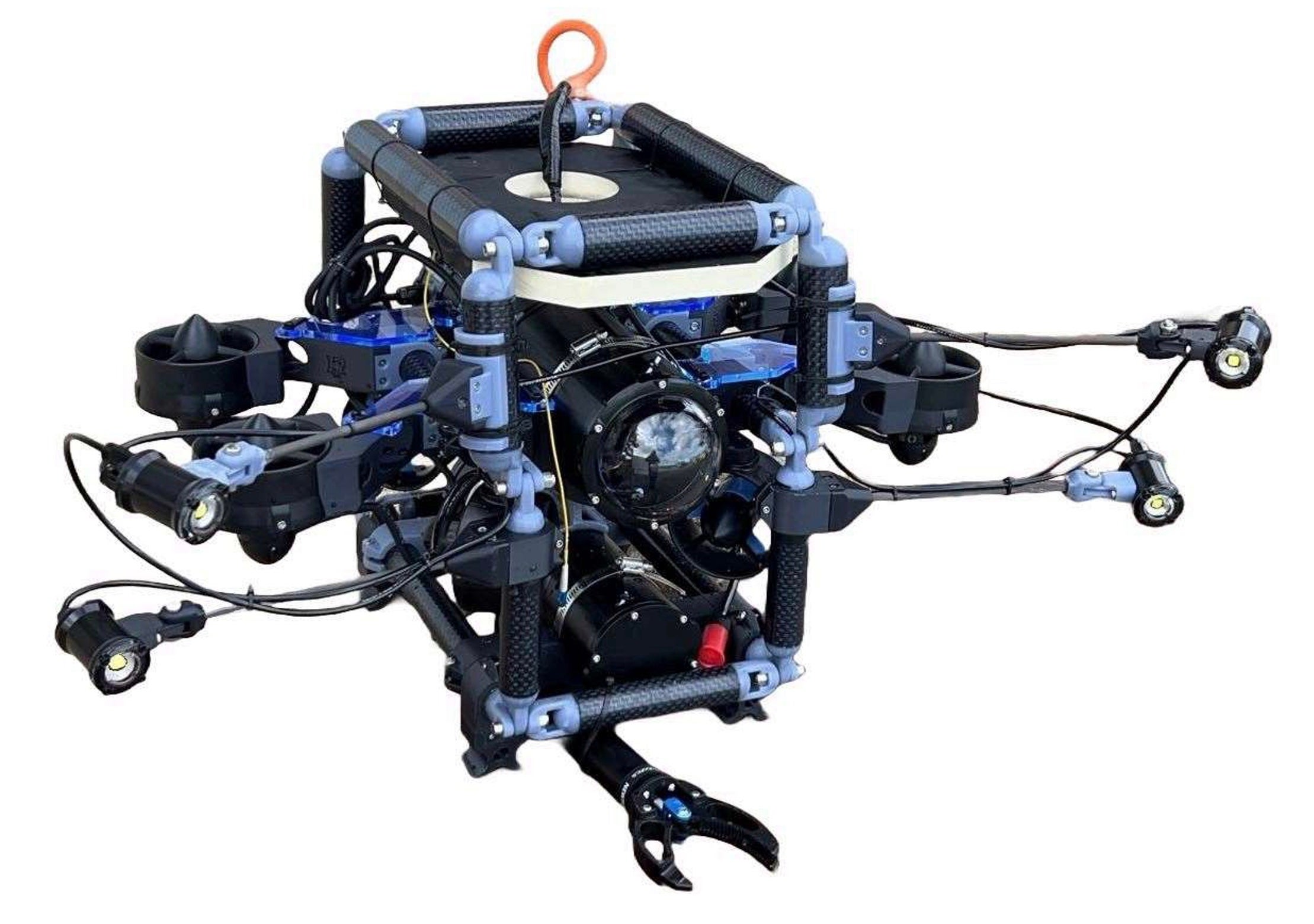
The ROV “FiberFish”
2. Results of the Cruise
This cruise resulted in a wide variety of interesting data, some of which including photography of native flora and fauna, CTD (conductivity, temperature, and depth) information from the water column, and qualitative evaluations of the developmental vehicle used. There are a multitude of images and videos from this cruise, all showing vibrant and diverse life at the seafloor. It is hoped that this can be scrutinized by biological scientists to achieve some level of understanding or classification of the diversity present at each of the dive sites. Additionally, the ROV FiberFish was able to collect biological samples across multiple dives, including different corals and small animals.
From this cruise, a better understanding and mastery of deployment was achieved. The non-conventional nature of the sailing vessel provided the perfect environment to challenge the set-up and deployment flexibility of the system. Due to its simple nature, consisting of a laptop and charger, multiplexer and power source, an Xbox controller (Fig. 6), and a fiber optic reel constituting the tether of the vehicle, the ROV FiberFish was able to be successfully deployed aboard the S/Y Eugen Siebold to deep-sea depths.

The S/Y Eugen Siebold Expedition Team