By Hugh Markey; photos courtesy of Ocean Exploration Trust
Scientists, researchers and engineers aboard exploration vessel (E/V) Nautilus successfully demonstrated that autonomous uncrewed systems can work collaboratively during a scientific mission. This latest development in technologies and methods will prove to be a “force-multiplier” for future ocean exploration.
Expedition leader Jason Fahy from URI’s GSO discussed the reasons behind the development of this collaborative approach. “The primary driving force behind this work is to conduct more exploration with a limited amount of resources. Doing multiple things simultaneously results in more and richer data being collected. Instead of conducting three independent operations, each taking up to a day, we can now simultaneously deploy these systems, allowing for a significant time savings but also synchronizing the timing of our data collection. This snapshot in time of what’s happening throughout the oceans depth is extremely powerful.”
“Where we’re going in the future is to automate that process by using artificial intelligence and machine learning to essentially give more autonomy to the robots to decide what’s important.”Jason Fahy, Associate Director, OECI
OECI Executive Director Adam Soule from GSO oversaw the process and noted the cooperative spirit that ran through the whole process. “The cooperative institute is in its third year, and it works with federal agencies, NOAA, and academic partners. All of these are members of the partnership. There is also cooperation among the operations teams for these vehicles, which is beneficial. It’s exciting to see the vehicles cooperate with each other.”
Fahy explains the ideal operation they hoped for. “We have an autonomous surface vessel mapping the sea floor and collecting oceanographic information; at the same time, a very quiet autonomous underwater vehicle (AUV) taking observations hundreds of meters below the surface; and finally another AUV up to 5000 meters below collecting samples and capturing imagery of the seafloor. Not only are we streaming all this exploration over the internet, but the public and scientific community can now have a glimpse of what’s happening throughout the water column at the exact same time.”
Preparation for the cruise was complex, and even mundane issues needed to be worked out prior to the cruise. “There are so many different challenges,” Soule said. “One logistical challenge is that ships have a limited number of berths. And each one of these vehicles has a team of five to ten people. Quickly, you realize that once you have all these vehicles on board, you’re running out of space for the people that operate them. We’re trying to use our satellite connection to shore to take some of the engineering and operational expertise off the ship so that we can still operate these multiple vehicle systems.” As it stood, the expedition carried 45 people aboard, from graduate students to professional engineers to the ship’s crew.
This leap ahead in ocean exploration was due to the ongoing support of NOAA Ocean Exploration. “NOAA has the vision to not only fund ocean exploration but the development of the next generation tools and operational methods,” Fahy said.

The Ocean Exploration Trust provided the E/V Nautilus and hosted teams from the University of New Hampshire’s Center for Coastal and Ocean Mapping and Woods Hole Oceanographic Institution for this multi-robot collaboration. In just two weeks at sea the robots spent 210 hours in the water over the course of thirty dives. The three robots, DriX, Mesobot, and NUI were all put to the test, with E/V Nautilus serving as the command center and host vessel.
Soule explained why getting the vehicles to communicate with one another was an accomplishment. “We are operating within this extremely bandwidth-limited environment. You don’t have Wi-Fi in the ocean, you don’t have radio, you basically can send information via sound and over very short distances via light. And so you have to figure out how to extract the relevant information from one vehicle, distill it down to a kind of small message and send it to another vehicle. Plus, the vehicles must have the same kind of technology on them to send and receive messages.
“Because we’re working cooperatively, we can ensure that we have the correct hardware on each vehicle in order to communicate with each other to distill the information down to small messages,” Soule said. “What we’ve done so far is we’ve kept a human in the loop so the surface vehicle will send its information back to the ship. Experts will look at it and determine what it means. Then, they’ll make small changes, retask it to another vehicle, and send that distilled information to the vehicle.”
“Right now, we require humans in the loop to do that distillation, but where we’re going in the future is to automate that process by using artificial intelligence and machine learning to essentially give more autonomy to the robots to decide what’s important and how they should retask,” Soule said.
“Together, we made huge strides in how we can explore the ocean—from mapping, to sampling, to vehicle-to-vehicle communication.”Adam Soule, Executive Director, OECI
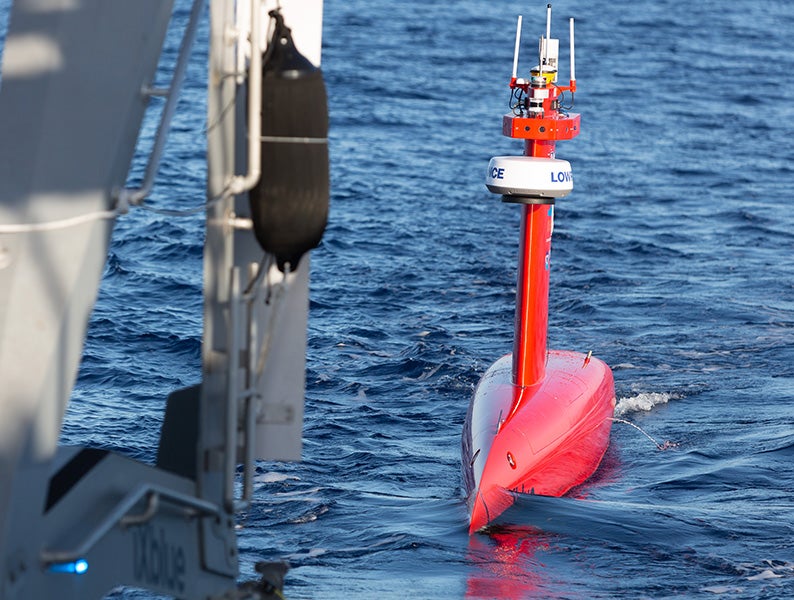
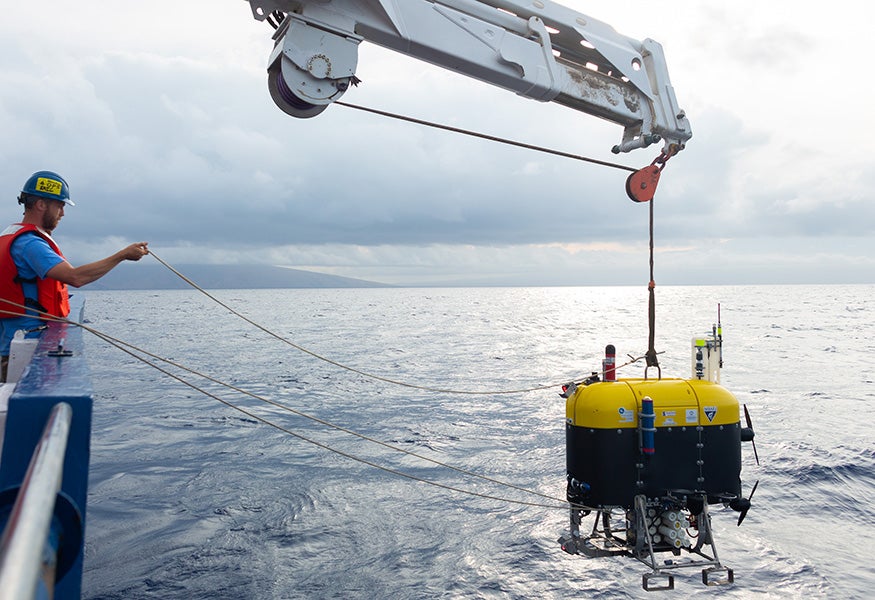
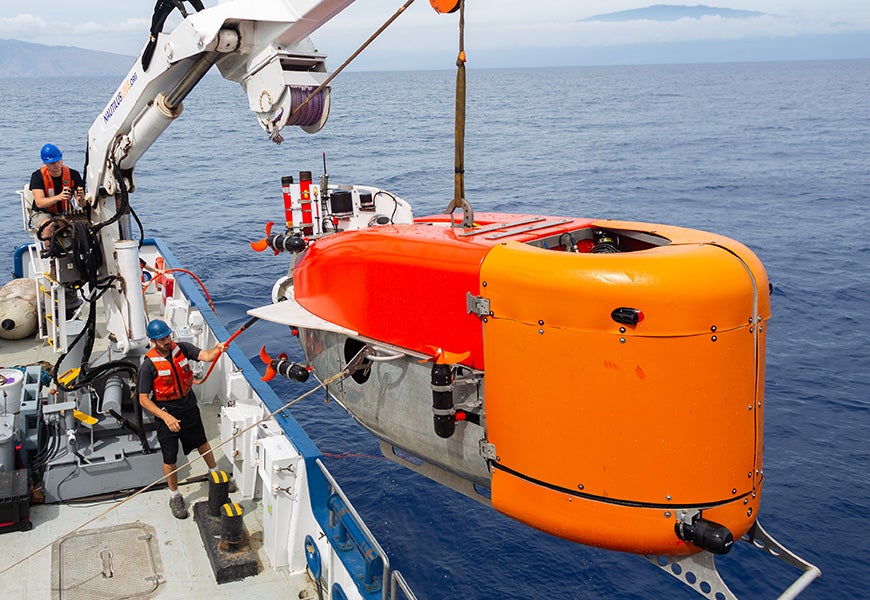
Operating off Oahu, Hawaii, as a base, the scientists used the uncrewed surface vessel DriX, the hybrid remotely operated underwater vehicle Mesobot and hybrid ROV Nereid Under Ice (NUI) in the 16-day cruise. The team used DriX for mapping, along with using its marine broadband radio capabilities as a long-distance communications link that can reach up to 20 kilometers. This allowed the ship to move away from DriX and carry out its own missions.
“It was really crawl, walk, run,” Fahy said. “We began with just getting everything into the water safely and robots working individually. Then we paired the vehicles together and found the sweet spot of how they could collaborate and contribute.” As success built upon success, the group decided to put all three vehicles to work attempting to answer a genuine scientific question.
“We utilized a pressing question to give meaning to our technology demonstration. This had to be more than just a technology operation. We’re being funded to explore and do science. These sorts of technologies are just the tools we use to conduct science.”
Eventually, mapping from DriX indicated the presence of a pinnacle rising 75 meters from the seafloor that was unique and worthy of exploration. Based on the DriX data, the team launched Mesobot and instructed it to head to the location, all the while with DriX circling the area at the surface. In examining their screens, the group noticed what looked like shimmering in the water, which indicated some change in water density. One of the sensors on Mesobot was a CTD (conductivity, temperature, and depth) that gave further evidence that something was there. Fahy and the group decided it was worth investigating. “We saw an anomaly in the conductivity of the water around the vehicle. We decided to explore not only the seabed with the NUI but the water column above and at the sea surface.”
“The excitement came when we could see anomalies and unique conditions in data from three of the vehicles. It turns out fresh water was flowing beneath the seafloor and up through this pinnacle, the sensors were picking up the density difference. While NUI was measuring water density, Mesobot was registering changes in fish behavior when they swam near the plume of fresh water. It was only because of our multiple vehicle capability that we were able to document the effect of this freshwater plume throughout the water column,” Fahy said.
“Together, we made huge strides in how we can explore the ocean—from mapping, to sampling, to vehicle-to-vehicle communication,” Soule said.
Soule too sees the mission as a positive. “Success is not necessarily when you’re trying to do the things that we were trying to do that are challenging and advancing the technology. Success isn’t necessarily measured on a cruise. The development of these technologies happens in steps, and over years, not weeks. But with this particular cruise, when we got to the final day, and could deploy all three systems simultaneously, one at the surface, one in mid-water, and one at the sea floor and have them exploring a feature in the ocean from the top that felt very successful to me. That felt like we had arrived at a landing on the staircase to the future and could see the path ahead.”
Next year, the expedition will kick it up a notch with more challenging conditions. With the vehicles worth roughly one-half million dollars to $2 million apiece, the team walks the line between being overly cautious about the conditions they subject the vehicles to and pushing too hard. “We don’t put the vehicles in harm’s way to advance them,” said Soule. It’s not that we will only do things that we are sure will succeed. We will take risks in order to push the technology forward. But within that context of being as prepared as we can for any eventuality.”

“It’s not going to be in the relatively sheltered waters near Hawaii,” Fahy said. “We’ll be in an unexplored part of the ocean prepared for our robots to make the next big exploration discovery!”