By Michael Blanding
On a blue-sky sunny day at the Graduate School of Oceanography’s Marine Ecosystem Research Laboratory (MERL), Chris Roman stands outside showing off his latest robot. As he presses a button on a remote control, a boxy machine resembling nothing so much as a droid from Star Wars emerges from a cylindrical test tank. The top half of the refrigerator-sized contraption consists of bright yellow floats inside a metal cage, topped with an array of sensors, while the bottom contains a complex assemblage of tanks and propellers that maneuver the vehicle.
Its name, “VAMPIRE” (Visual Acoustic Mesopelagic Profiler for Interdisciplinary REsearch), is a nod to the vampire squid, a creature from the mesopelagic zone, between 200 and 1,000 meters. “I live on the fence between marine science and robotics,” Roman explains. “The stuff I’ve done are niche vehicles that do specialized things, each built with a science-tailored design and overarching goal.” This particular robot has been built to explore the mesopelagic, also known as “the twilight zone,” beneath the range penetrated by visible light, where many marine animals travel between warm, oxygen-rich water at the surface and deeper, colder areas. Those animals have been notoriously difficult to study, as many avoid nets that biologists drag through the area.
“You can only say what you caught—you can’t say what you didn’t,” says Roman, who designed VAMPIRE to gather data without disturbing marine life as it rises and falls through the water column. The engine on the bottom pumps oil silently in and out of tanks to control buoyancy, while low-light cameras and acoustic equipment record animal activity and other sensors monitor oxygen, temperature, salinity, and other information. The robot, funded with a grant from the National Science Foundation, could transform study of a part of the ocean that has heretofore been shrouded in mystery. Oceanographers may then answer new questions about the distribution of species and how they are responding to climate change.
It’s just one in a number of devices Roman has custom-designed to expand on our knowledge of the depths. “My goal has always been to know just enough oceanography to figure out what novel observations are likely to solve scientific mysteries, then go out and build the thing that gets us to the next observation,” he says. Roman is quietly revolutionizing oceanography one robotic device at a time. Meanwhile, he’s educating the next generation of robotic engineers to create ocean-going devices of their own.
“Often students have talent, but they need the building blocks to get from where they are to where they need to be.”
Soon, much of Roman’s research, development and teaching will take place in the 32,000 square-foot Ocean Robotics Laboratory (ORL). Construction began in March of this year and the ORL is set to open in 2026.
ORL will include a two-story assembly and staging area, equipped with cranes to maneuver vehicles in and out of its 30- by 20-foot test tank. The building will also house more than a dozen labs and two machine shops opening directly onto the assembly area, to facilitate the work of both students and faculty as they build, repair and test robotic vehicles.
“The new space will make fabrication, field preparation and testing much easier.…It will give [students] exposure to more projects and a more cohesive immediate peer group.”
“Currently, things are spread out across several buildings in subpar spaces,” says Roman, who is excited about the opportunity presented by a state-of-the art facility coming online. “The new space will make fabrication, field preparation and testing much easier.” It will also bring faculty together, making it easier to collaborate, and bring students into the process as well. “It will give them exposure to more projects and a more cohesive immediate peer group,” he says, strengthening their collaborations and to learn from each other and faculty.
Knowledge Transfer
“He does the best job at explaining complex topics,” says Ph.D. candidate in ocean engineering Breanna Motsenbocker, who focusses on underwater imaging. “He knows just how to explain things at a level that meets students where they are at.” Motsenbocker took Roman’s signature course on underwater mapping and imagining, which was instrumental in giving her a grounding in the subject matter. He’s now been a crucial advisor as she has developed her own devices. “He’s always the harshest critic in the best way,” Motsenbocker says. “He always thinks, ‘How do we take this a step further,’ so you didn’t just make a one-off thing, but you are really making a contribution and helping solve a broader issue.”

Robots can perform tasks that are “dull, dirty, or dangerous”—that is, repetitive tasks that may be difficult or unsafe for people. Within oceanography, they are able to dramatically increase the number of observations a scientist is able to make. Jake Bonney, a Ph.D. student in ocean engineering, uses an autonomous kayak Roman designed—an off-the-shelf sea kayak outfitted with GPS navigation, a winch, and sensors—to take samples in coastal environments. “The amount of samples a scientist can collect by hand in a day is maybe 10 or 20,” Jake says. “But with the kayak and four to six hours of battery, we can collect thousands—and do so a lot more accurately.”
So far, Bonney’s initial research has found connections between factors on the surface and those deeper in the water that may impact growth of algae blooms. His research may eventually carry implications for drinking water sources throughout New England. “He’s very practical,” Bonney says about Roman’s approach to problem-solving. “He likes to break problems down into components and tackle them one at a time. He always says: ‘we don’t want to reinvent the wheel—we need to get the job done.’” In approaching robotic systems, Roman says, students often have ideas that are too complex and ambitious. He often sees his role as reining in their aspirations to make them more manageable. “I always argue for simplicity,” he says. “Often students have talent, but they need the building blocks to get from where they are to where they need to be.”
Whenever possible, Roman brings students back to the practical applications that robots are meant to solve, collaborating with scientists to figure out how to maximize the amount, quality and accuracy of data they are able to collect. “Within robotics, there is a tendency to focus on the hot, new thing, but you need to contextualize an idea and ask who it’s useful for,” he says. “I hope students come out of the lab with a core skill related to their projects, but also an awareness of how the world works, and the larger context about what they are doing.”
That practical mindset has been present throughout Roman’s career, from studying robots as a mechanical engineering student at Virginia Tech to working on robotic structures for space satellites at University of California–San Diego. Frustrated by the slim chances his designs would actually be used beyond the lab, he switched to focus on the ocean in the early 2000s, just as underwater robotics for scientific research was taking off. He crossed the country to study for a Ph.D. in a joint program between Massachusetts Institute of Technology and Woods Hole Oceanographic Institution. There he worked with scientists studying coral reefs and deep-sea hydrothermal vents and creating vehicles for underwater mapping and imaging. “Everything had a science backend—you could explain all the robotics in the world, but then they were like: ‘Great, where are my photos?’”

In 2006, he was recruited to GSO by professor Robert Ballard, who discovered hydrothermal vents and explored the wreck of RMS Titanic. Roman began mapping undersea environments with his remotely operated vehicle, Hercules, before branching off to create his own vehicles. Among them is a benthic lander, developed in collaboration with GSO professor Steven D’Hondt, to take samples from the ocean floor at depths up to 11 kilometers. “There’s no place it can’t go in the world’s oceans,” Roman says with pride.
One of his most iconic inventions is the Wire Flyer, a remote vehicle that can be towed behind a ship to take continuous high-resolution samples of ocean conditions. The device is a giant leap forward from clunky manual methods of taking individual samples miles apart and interpolating between them. At the same time, it uses minimal battery power, driven by wings that move up and down as it “flies” behind a ship, taking advantage of the flow of ocean currents like a child sticking her arm out the window of a fast-moving car.
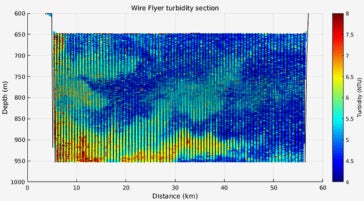
“There’s no other instrumentation that can measure the horizontal and vertical scales we’re interested in well below the sea surface,” says GSO professor Kathy Donohue, who researches how climate change affects large ocean currents, and how in turn they influence weather around the globe. Unlike gliders or other autonomous vehicles, the Wire Flyer can be towed through a powerful eddy or vortex caused by underwater storms. “Because you’re on the ship, you can go the direction you want, not in the direction the ocean is trying to push you,” Donohue says.
Practical Experience
“It’s better to take it slowly and think clearly about what you know about the problem, and what are the steps you need.”Lindsay Grose, Ph.D. student
Aboard ship, Donohue appreciates that Roman keeps his head when things inevitably go wrong. “He has a really calm demeanor, which is a great thing to have at sea,” she says. “He’s very good at helping people stand back and refocus when they get a little stuck.” That approach has also been helpful for Ph.D. student Linsday Grose, who works in Donohue’s lab on the ocean currents project, and has been to sea several times with Roman using the Wire Flyer. “You’re not going to get anywhere answering a research question if you just jump in trying random things and making a bunch of plots and figures,” Grose says.
“It’s better to take it slowly and think clearly about what you know about the problem, and what are the steps you need to take to get to a conclusion.”
Oftentimes going to sea is an overwhelming experience for students, says Roman, subjecting them to the uncertainty of changing weather conditions and equipment that may or may not function the way it was designed in the lab. “There’s always a big shock, when they actually see what it takes to put a robot in the ocean,” Roman says, “especially on a ship that costs $50,000 a day to operate and when there are 20 people watching you and watching the clock. Students realize: ‘People depend on me to do this, and there is a schedule to keep, and my actions affect other people.’”

The experience is invaluable for students, Roman says, helping them better understand how devices are used and data is collected, so they can work with both better in the lab. A few days after demonstrating VAMPIRE on the Narragansett Bay Campus, he took it to sea with several students as a test of the system. Master’s student Julian Blanco has been working with VAMPIRE for a year and a half and was in charge of monitoring the buoyancy engine. “Everything worked just the way Chris has envisioned it,” he says, noting that the crew dropped the vehicle down to 500 meters and successfully collected data from all of its various sensors. He looks forward to making some tweaks to the software before going out again to collect more targeted data about animals in the mesopelagic.
Blanco also plans to start his Ph.D. studies with Roman next fall as he is particularly interested in examining how multiple robotic vehicles might work in unison to increase impact. Sometime in the future, for example, a cruise might employ VAMPIRE to silently gather mid-depth data at the same time Wire Flyer complements those readings with high-resolution transepts across a wider range of the same territory. In pursuing his research, Blanco sees Roman as a role model for his own career. “I don’t want to be a pure roboticist, but I’m not a pure scientist,” he says. “What drives me is taking my knowledge and merging the two, which is something Chris does exceptionally well—by straddling the two worlds, he gets to create vehicles that really make an impact.”